There is a lot of information (and misinformation) regarding airsoft motors out there. We’re going to try to break everything down so that you will have a better grasp on what it all means.
The Basics
AEG motors are, quite simply, a DC (Direct Current) motor. DC motors are everywhere in our lives: RC cars and planes, cordless tools, the fan in your ExFog, and the motor inside your AEG. Every single one of these motors works exactly the same: electromagnetism. In physics, electromagnetism is an interaction that occurs between particles with electric charge via electromagnetic fields. And that’s it on the physics lesson. Mostly.
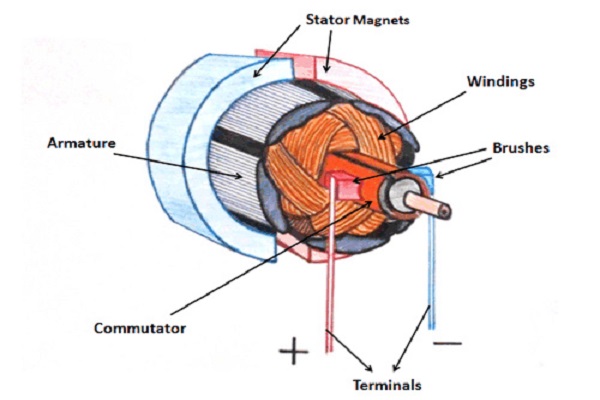 DC motors have common parts: rotor (the part that rotates), stator (the stationary parts), brush (delivers electricity to the rotor, unless it’s brushless), commutator (made from copper, it’s a split ring that provides electricity to the armature windings), and armature (in the simplest terms, the rotating circuit).
DC motors have common parts: rotor (the part that rotates), stator (the stationary parts), brush (delivers electricity to the rotor, unless it’s brushless), commutator (made from copper, it’s a split ring that provides electricity to the armature windings), and armature (in the simplest terms, the rotating circuit).
A coil of wire with a current running through it generates an electromagnetic field aligned with the center of the coil. The direction and magnitude of the magnetic field produced by the coil can be changed with the direction and magnitude of the current flowing through it.
 A simple DC motor has a stationary set of magnets in the stator and an armature with one or more windings of insulated wire wrapped around a soft iron core that concentrates the magnetic field. The windings usually have multiple turns around the core, and in large motors there can be several parallel current paths. The ends of the wire winding are connected to a commutator. The commutator allows each armature coil to be energized in turn and connects the rotating coils with the external power supply through brushes. Brushless DC motors have electronics that switch the DC current to each coil on and off and have no brushes. (Warhead motors have magnets on the rotor and windings in the stator.)
A simple DC motor has a stationary set of magnets in the stator and an armature with one or more windings of insulated wire wrapped around a soft iron core that concentrates the magnetic field. The windings usually have multiple turns around the core, and in large motors there can be several parallel current paths. The ends of the wire winding are connected to a commutator. The commutator allows each armature coil to be energized in turn and connects the rotating coils with the external power supply through brushes. Brushless DC motors have electronics that switch the DC current to each coil on and off and have no brushes. (Warhead motors have magnets on the rotor and windings in the stator.)
The total amount of current available for the coil, the coil’s size, and what it is wrapped around decide the strength of the electromagnetic field created.
Both ceramic magnets and rare earth magnets can be found in AEG motors, the former used by manufacturers to keep their costs down, the latter is found in upgrade motors for better speed and torque.
Brushed vs. Brushless
The brushes in a brushed motor are no longer literal copper brushes, but the name has remained. Instead, the brushes are two small chunks of a soft conductive material like carbon that, in conjunction with small springs, applies constant pressure to the commutator and allows electricity to flow into the coils.
The brushes continuously wear down during use, and at some point will need to be replaced. This could take years or even decades, depending on how much the AEG is used, and the overall quality of the motor. However, with the analog physical contact, anyone troubleshooting down to the component level on their motor can easily see if the brushes need to be replaced (or possibly the springs that are keeping the brushes in place).
Think of brushed motors like the old distributor caps in vehicles, where a physical electrical connection was used to send electricity to each spark plug.
Brushless motors operate in the same electromagnetic way as brushed motors, however they have an internal inverter that converts DC to AC, which doesn’t require the same physical connection as the brushed motors. The added circuitry increases the cost of the motor by quite a bit, but because there is no physical connection and parts to wear down, brushless motors will tend to last longer and be more efficient. On the other hand, brushless motors are completely dependent on complicated circuitry.
Brushless motors are a lot like today’s vehicles that no longer have a distributor cap – but rather a computer that decides when each spark plugs get the electricity.
Speed vs. Torque
Speed comes from voltage. Torque comes from amps. Because of the nature of electricity, usually you can have either speed, or torque. Rarely can you have both. This is where we get into that dreaded TPA number or Turns Per Armature.
There is a finite amount of space inside our motors, so if you want more speed, the motor has to have thicker wire to allow more voltage in the magnetic field. The thicker the wire, the fewer the turns per armature, which means less torque.
Inversely, higher-torque motors use more turns per armature, but the thinner wire doesn’t allow as many volts to run through it. This is all due to the inherent impedance of the wire.
So remember:
Thicker wire = better voltage = less current = faster RPM = lower TPA = lower torque.
Thinner wire = less voltage = more current = lower RPM = higher TPA = higher torque.
Regardless of high speed or high torque, motors with rare earth magnetics will be better.
Ceramic (Ferrite) vs. Rare Earth (Neodymium)
Ceramic magnets are low cost, lightweight, and high energy. They are primarily made of the materials iron oxide and strontium carbonate, which are very easily attainable and comparatively low cost. Because of their low cost, they are one of the most popular permanent magnets.
Rare-earth magnets are the strongest type of permanent magnets available today and produce significantly stronger magnetic fields. Because of the inherent stronger magnetic field, you can expect more torque with fewer TPA than motors with ceramic magnets. These motors are also able to use electricity much more efficiently, which is why they don’t get as warm as the cheaper ferrite-based motors.
Numbers
You’ll read a lot of numbers on the can of an AEG motor. However, as with ANY labeling, you need to realize that manufacturers will only label things with the biggest (or lowest) number that they can legally get away with.
That 40,000 RPM that’s being boasted by the manufacturer? That’s the maximum speed that motor can obtain without a load, and possibly at the highest possible voltage (usually 11.1v). Warhead is a lot more transparent with their specifications, and for a motor that costs north of $100, they’d better be.
On a side note: Warhead motors are build completely differently than that stock KWA or that upgraded ASG motor, and that’s a long discussion for another time, perhaps. To that end, with very few cons, yes, Warheads are definitely a better overall motor. No, they don’t list TPA, because all their motors have basically same same high torque. As their sales pitch goes: you just pick the RPM you want.
RPM vs. RPS
A long time ago, while first researching motors and such, I came across a now-defunct spreadsheet by “Hunterseeker5”. This spreadsheet was highly spoke about by players all across the globe for it’s accuracy in “predicting” what sort of RPS (Rounds Per Second) you could expect to get out of your setup.
By playing with the numbers, you could actually decide on an RPS you wanted, then playing with the motor RPM and TPA, gear set and ratio, battery, and spring, in the spreadsheet, you could plan your build. Even though the spreadsheet is gone, there is still his formula kicking around online.
ROF=(X*V)/(TPA*ratio)
Here’s some explanation on the variables:
This is based on the assumption that the motor has neodymium magnets, unlimited power is available (powerful lipo, negligible voltage drop), and implicitly then that spring rating will not significantly affect ROF. It also assumes a rather efficiently built gun.
V= battery’s nominal voltage (assumed peak charge)
TPA= the number of winds on an armature of your neodymium magnet motor. If you don’t know the TPA of your motor, you can use ~14 for high speed, 16 for ACM “torque” motors, and ~22 for slow really high torque motors.
Ratio= your ACTUAL (not nominal, count yourself and remember it includes the pinion) gear ratio
ROF= Rate Of Fire
X= the constant 809.5135 (because I like them, so you and your sigfigs can go play with someone else) For a somewhat less efficient gun, or a lame buffer tube battery, or anything else like that, this constant can be reduced. Users in those cases may find 675 to be a more accurate value for X.
Basic RPS Calculator
Please note that the result is assuming your motor can efficiently draw the installed spring. If the motor is struggling, you’ll never get the displayed RPS.
As always, if there are things I should add, or things I got wrong, please let me know. Cite your sources though. 🙂